대표어
대표어









권호기사보기
| 기사명 | 저자명 | 페이지 | 원문 | 기사목차 |
|---|
결과 내 검색
동의어 포함
title page
Abstract
Contents
Chapter I. Introduction 13
1.1. Background of the research 13
1.2. Objective of the research 17
1.3. Outline of the dissertation 18
Chapter II. Related researches 20
2.1. Related researches on bimanual robot 20
2.2. Related researches on robotic assembly 23
2.3. Related researches on motion planning 26
2.4. Related researches on manipulability 28
Chapter III. Adaptive assembly model 30
3.1. Adaptive model of assembly 30
3.2. Geometric constraint equation in planar assembly 32
3.3. Geometric constraint equation in polyhedral assembly 38
Chapter IV. Motion planning for bimanual robot 44
4.1. Conversion of task-level transition to lower-level commands 44
4.2. Motion planning based on optimization using cost function 50
4.3. Motion planning for bimanual robot 57
4.4. Simulation 64
Chapter V. Task-compatibility-based motion planning 76
5.1. Definition of task-compatibility 76
5.2. Cost function based on task-compatibility 80
5.3. Multiple kinematic performance indexes 89
Chapter VI. Experiment 93
6.1. Bimanual robot system 93
6.2. Experiment 99
Chapter VII. Conclusions 110
Summary 113
References 115
Acknowledgement 122
Curriculum vitae 124
Figure 1.1. Block diagram of the control of the robotic task 14
Figure 3.1. Schematic of the approach to bimanual assembly 31
Figure 3.2. A primitive contact in planar assembly 32
Figure 3.3. Definition of a distance function 34
Figure 3.4. Distance between vertex and edge 34
Figure 3.5. Distance between vertex and edge using minimization 38
Figure 3.6. Vertex-face contact 40
Figure 3.7. Edge-edge contact 40
Figure 4.1. Gain of contact 45
Figure 4.2. Symbolic representation of L-shaped peg and hole in planar assembly 47
Figure 4.3. L-shaped peg and hole in polyhedral assembly 47
Figure 4.4. An example transition 50
Figure 4.5. The modified command 59
Figure 4.6. Schematic diagram of force control 60
Figure 4.7. Force control scheme for bimanual robot 60
Figure 4.8. Bond graph representation of PCT and FCT 62
Figure 4.9. Hierarchical coordination scheme 63
Figure 4.10. Schematic diagram of the motion planner for the bimanual robot 64
Figure 4.11. Dimension of L-shaped peg and hole (mm) 65
Figure 4.12. Only the peg moves and the cost function CJ is used(이미지 참조) 66
Figure 4.13. Only the hole moves and the cost function CJ is used(이미지 참조) 66
Figure 4.14. Both the peg and hole move and the cost function CJ is used(이미지 참조) 67
Figure 4.15. Only the peg moves and the cost function C₂ is used(이미지 참조) 68
Figure 4.16. Only the hole moves and the cost function C₂ is used(이미지 참조) 68
Figure 4.17. Both the peg and hole move and the cost function C₂ is used(이미지 참조) 69
Figure 4.18. Movement in polyhedral assembly 71
Figure 4.19. Before and after transition in polyhedral assembly 72
Figure 4.20. Simulation ofL-shaped peg-in-hole assembly with the given initial sequence 73
Figure 4.21. Snaps of the simulation with the given sequence 75
Figure 5.1. An example state transition 82
Figure 5.2. Initial state and poses of two manipulators 83
Figure 5.3. State and poses after the transition 83
Figure 5.4. Velocity ellipsoids of the initial state 84
Figure 5.5. Force ellipsoids of the initial state 84
Figure 5.6. Velocity ellipsoids after the transition 85
Figure 5.7. Force ellipsoids after the transition 85
Figure 5.8. Initial pose 86
Figure 5.9. Pose and manipulability measure when only robot 1 moves 87
Figure 5.10. Pose and manipulability measure when both robots move 88
Figure 5.11. Movement using multiple PI 92
Figure 6.1. Bimanual robot system 95
Figure 6.2. Assembly process of L-shaped peg and hole 95
Figure 6.3. Control architecture for bimanual robot system 96
Figure 6.4. The data structure and flow 96
Figure 6.5. Schematic of communication between host and S4C+ controller 98
Figure 6.6. Schematic of client program 98
Figure 6.7. Example for experiment 100
Figure 6.8. Force-Position control (Fref=2N, k=0.02)(이미지참조) 101
Figure 6.9. Position-Force control (Fref=2N, k=0.02)(이미지참조) 102
Figure 6.10. Force-Force control (Fref=2N, k=0.02)(이미지참조) 103
Figure 6.11. Position profiles during transition 104
Figure 6.12. Force profiles during transition 105
Figure 6.13. Distance between elements during transition 105
Figure 6.14. Frames of bimanual robot system 106
Figure 6.15. Given sequence of L-shaped peg-in-hole assembly 107
Figure 6.16. Snapshots of assembly process 107
Figure 6.17. Position profiles of bimanual robot during assembly process 108
Figure 6.18. Force profiles of bimanual robot during assembly process 109
본 논문은 양팔을 이용하는 조립 작업에 있어서 로봇의 운동 계획법을 제안하고자 한다. 주어진 로봇 작업을 로봇에 적용하기 위해서는 부품의 기하학적인 정보를 이용하여 부품의 운동을 계획하고 부품의 운동을 로봇의 명령으로 변환하기 위한 방법이 필요하다. 그리고 작업의 실제 구현을 위한 양팔 로봇의 제어 방법과 협동 방법에 대한 연구가 필요하다.
3 차원에서 다면체 부품의 조립작업을 두 부품의 꼭지점, 모서리, 면의 쌍으로 이루어진 기본 접촉(Primitivecontact)의 집합으로 정의하고 두 부품 사이의 관계를 거리 함수(Distance function)로 나타낸다. 작업 레벨(Task-level)에서의 부품의 이동을 등식과 부등식의 조합으로 수식적으로 표현하고 가치 함수(Cost function)을 제안하여 부품의 운동 계획법을 최적화 문제로 표현한다. 이 최적화 문제로부터 로봇의 기구학을 고려하여 부품의 운동 명령을 구한다.
두 부품의 운동 명령을 좌표 변환을 통해 각 로봇의 좌표계에 대한 운동으로 표현한다. 두 부품 조립 작업 중 접촉 상태를 유지하기 위하여 양팔 로봇에 대한 힘 제어 방법을 제안한다. 접촉 방향에 대한 각 로봇의 제어 방법을 고려하여 안정화된 힘 제어가 가능한 제어 구조를 제안하였다. 또한 조립 작업에 적합한 계층적 구조의 협동 방법을 제안하여 각 로봇의 제어와 조립 작업의 계획을 독립적으로 수행할 수 있도록 하였다.
양팔 로봇의 정교한 작업을 위하여 Task compatibility에 기초한 운동 계획 방법을 제안한다. 두 대의 로봇의 성능이 고루 증가할 수 있도록 가치 함수를 제안함으로써 작업 수행 중에도 각 로봇이 Singularity로부터 거리를 유지할 수 있도록 한다. 같은 작업에 대해 하나의 로봇을 사용하는 경우와 두 대의 로봇을 동시에 이동시키는 경우를 비교하여 두 대의 로봇의 경우 두 로봇 Singularity로부터 멀어질 수 있는 것을 정량적으로 확인하였다.
본 논문은 기존 연구가 부품의 이동 경로만을 고려하거나 로봇의 제어 방법만을 고려한 것에 반해 부품의 기하학적인 정보를 이용하여 작업레벨로부터 실제 양팔 로봇을 움직이고 제어할 수 있는 운동 명령을 구하는 방법을 제시함으로써 로봇의 운동 계획을 쉽게 할 수 있다는 기여점을 가진다.
두 대의 6 축 로봇을 이용하여 계층적인 제어 구조를 가지는 앙팔 로봇 시스템을 구축함으로써 로봇을 이용한 협동 작업이 가능하게 하였다. L 펙인홀 작업에 대한 실험을 통하여 제안된 운동 계획법을 통해 두 대의 로봇이 동시에 이동하면서 조립 작업을 완성시킬 수 있다는 것을 보였다.*표시는 필수 입력사항입니다.
| 전화번호 |
|---|
| 기사명 | 저자명 | 페이지 | 원문 | 기사목차 |
|---|
| 번호 | 발행일자 | 권호명 | 제본정보 | 자료실 | 원문 | 신청 페이지 |
|---|
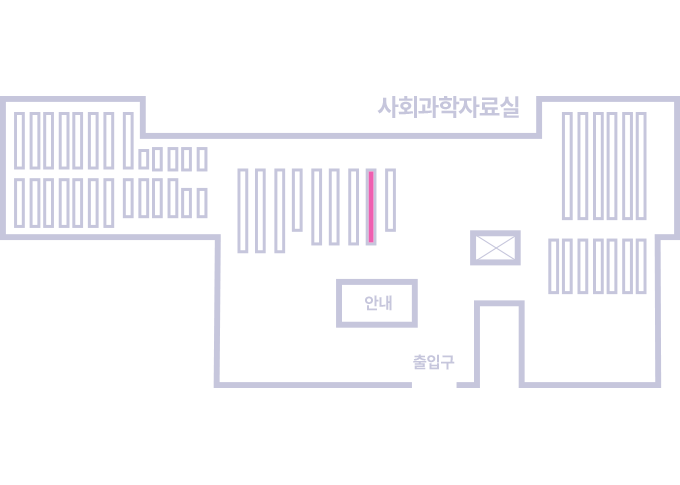
도서위치안내: / 서가번호:
우편복사 목록담기를 완료하였습니다.
*표시는 필수 입력사항입니다.
저장 되었습니다.